「データドリブン・デザイン研究ユニットの狙いと展開 ユニット長・高柳英明教授に聞く(前編)」はこちらからご覧ください。
最終目標は、多様移動手段の挙動安全評価システムの構築
データドリブン・デザイン研究ユニットの最終的なゴールは、多様な移動手段が混在するパブリックスペースでの移動安全と快適性を保つため、歩行者や自動運転車、PV相互の挙動特性を知り、接触事故の未然防止に役立てる「多様移動手段(Mixed Mobility)の挙動安全評価システム」の構築をすることです。メンバーが2〜3人でチームを組み、それぞれが目標達成のために必要なテーマを設定し、2024年に向けて研究を進めています。
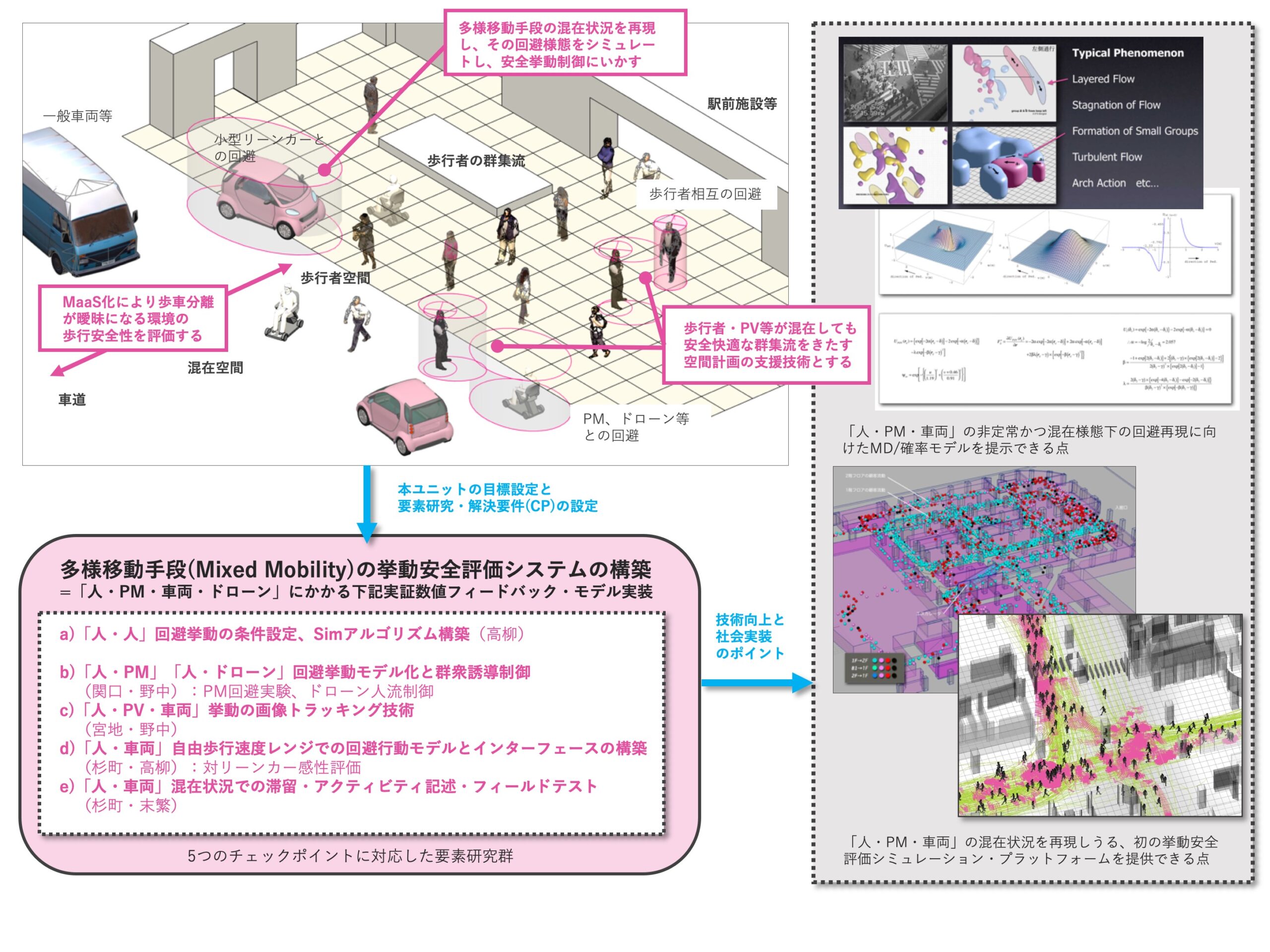
a)「人・人」回避挙動の条件設定、Simアルゴリズム構築
多様移動な手段が混在する状況下での回避と、他の移動個体の挙動に予兆現示がある場合の回避条件設定を実空間フィールドでの実験調査で明らかにします。
2020年10月から、総研IRCモーションキャプチャシステムを用い、[密度4パタン] x [交差角度3パタン]の群集と単独交差歩行者の回避実験を行いました。群衆の中を斜めに横断できるかどうかというのは、快適性のしきい値のひとつです。これは人と人の実験ですが、例えば車椅子が群衆を上手に進んでいくためには、斜めに横断ができるくらいの混み具合でなければいけません。この実験では斜め横断が可能な群衆の密度を検証。その成果を以て歩行安全評価シミュレーションへの数理基準策定にフィードバックします。
B1)「人・PM」回避挙動モデル化
都市部の人ごみにおいて、車椅子のようなパーソナルモビリティ(PM)の安全な自動運転の実現には、高度な制御と同時に人の動きのモデル化が重要です。人の動きの正確な予測は困難ですが、確率モデルにより定量的に扱うことが考えられます。さらに、PMに搭載したセンサで周囲の人の動きを観測し、ベイズフィルタによる位置推定をもとに確率分布を予測します。
現段階での進捗状況は、総研IRCのモーションキャプチャを用いて人の回避行動を計測。これをガウス過程でモデル化し、カルマンフィルタで位置と速度を推定。有限時間未来の動的な確率分布を予測計算しました。今後は予測点における確率分布と確率モデル予測制御に基づいた回避行動指標の定量化に取り組みます。
B2)「人・ドローン」群衆誘導制御技術
歩行行動は、パーソナルスペースを表すポテンシャル場を最小にする動きとしてモデル化でき、人の機動性から安心と安全を担保できる空間として解釈できますが、自律飛行するドローンの場合、機動性が高いことや安心を求める必要が無いことから、両者が近づいた際は、人が先に不快を感じ、ドローンを回避する動きを取る必要があると考えられます。そこで群衆流動においてドローンがスタック状態になるような、アルゴリズムを構築することで、滞留と混雑の緩和や解消をします。
研究の進捗状況ですが、群衆流を模擬した数値シミュレーション環境を構築するため、歩行者パーソナルスペースを目的方向への進行を維持する力と、他者や壁面と衝突を回避する斥力を生成する簡易ポテンシャル場として定義し、数値シミュレーションに実装し、オープンスペースを想定した対向群衆流を再現しました。
今後は柱などの空間要素を配置するなど、スタック状態が発生するシチュエーションを再現。さらにポテンシャル場の異なる自律移動体を導入し、スタック状態を緩和、解消するための自律移動体の行動アルゴリズムを開発していきます。
c)「人・PV・車両」の挙動の画像トラッキング技術
歩行者、PV、車両といったそれぞれ速度域が異なり、特異な回避様態を持つ多様な移動手段がひとつの場所に存在する状態が起こりうることを想定し、新たなトラッキング技術を策定します。
d)「人・リーンカー」歩行速度レンジでの回避行動インターフェース構築
都市部の自由歩行空間と親和するための、超小型モビリティ(リーン車両)の自動運転の回避制御アルゴリズムを検討します。具体的には、歩行者が安全・安心と感じる対車両距離に関する評価をもとに、歩行者行動モデル数理を求め、車両仕様にフィードバックします。
評価については、実フィールド・テストベッドによる挙動反応分析のほか、当事者視点と「他者×車両」を遠巻きに観察する客観視点による感性評価分析を行っていきます。
e)「人・車両」都市空間の滞留と回避行動インターフェース構築
滞留者と次世代モビリティとの混在状況を想定し、人間の滞留に対する衝突を回避し、親和を実現する路上滞留者のアクティビティ特性抽出および動態モデルを構築。また、滞留やアクティビティによるパーソナルスペース領域変化から、空間内の各モビリティの安全通過可能領域を構築します。
現在は実フィールドでのプレ調査を実施中で、今後AI画像解析技術を活用して行動データを解析する予定です。

高柳 英明(タカヤナギ ヒデアキ)
所属:都市生活学部
職名:教授
出身大学院:早稲田大学 博士 (理工学研究科) 2003年 修了、早稲田大学 修士 (理工学研究科) 1998年 修了
取得学位:博士(工学) 早稲田大学 2003年
研究分野:建築デザイン・インテリアデザイン・建築計画・人間工学

東京都市大学 総合研究所 未来都市編集部です。未来の都市やまちづくりに興味・関心を持つ方に向けて、鋭意取材中!